



























协作机器人在汽车装配中的应用继续前进。AMS报道应用、技术、及其盛行的原因。

仅仅1年前,德国Dingolfing的宝马工厂里,一台新的机器人投入使用。但是这台机械并不是大批量、高动力生产的设备,并不适用于汽车喷漆或焊接。但是,它却代表汽车业目前不断稳步加强推进的趋势,即人机协作(HRC),也被称作协作机器人。
上面所售的机器是Kuka公司出品的LBR iiwa轻型机器人,现在已经进入之前由人类操作员独自操作的领域,用以支持繁重而重复性任务,先是举起,然后将差速器箱安装到前轴变速器上。这些箱子重量高达5.5公斤,而且不仅仅是在安装过程中按照要求多次举高,而且还需要精度,保证安装精确,避免对系统元素的破坏。
在工厂采用创新性机器人,是汽车制造商和机器人供应商联合努力的结果。早在Dingolfing采用这种技术之前,Augsburg宝马工厂就已经进入开发工作阶段了。在启动阶段,机器人是在工作区域上面细细的钢铁构架上安装的 — 这是由机器人轻质结构自身决定的。机器人重量仅为30公斤。

Kuka公司先进技术方案副总裁Henning Borkeloh肯定的说,这是核心细节。最重要的部分是所有限定空间都有机器人和支撑结构所占据。他说,支撑结构尺寸为200x200mm,高度为1,400mm。
重型零部件,轻型触感然而,正如Borkelh进一步解释的那样,项目需要一些机灵的思维,才能应对挑战。他强调说,“安装重型差速器箱是一件非常精细的任务。敏感的齿面一定不能在啮合齿轮的时候收到破坏。其中一个挑战是所要安装的不同零部件的重量不同。从根本上说,我们必须要找到正确的参数,按照不同的规格要求,调整机器人的扭矩灵敏度。”
尽管如此,Borkeloh解释说,看上去最有震撼力的应用(机器人倒置)在Kuka看来实际上非常普通。他说,“这对我们来说很一般。我们已经为很多客户采用了嵌入顶棚的方案”制造机器人本身也是一个促成因素。他说,“LBR iiwa机器人的7个轴上的每一个都有关节扭矩传感器,这样就不需要外部传感器了。加上机器人轻质结构,就能在任何位置上工作了”。
第三只手事实上,Borkeloh说,融入到机器人中的传感器系统对这种特殊应用的适应性来说非常关键。他强调说,“装配差速齿轮是超敏感应用,钝齿轮在于另一个齿轮啮合时一定非常小心。”实际上,这个机器人在所有的轴上都有关节扭矩传感器,才能具备必要的触觉检测能力和编程一致性。他还说,“这就是要人类通过简单的姿势控制机器人应用的顺序,但不需要控制设备 — 比如触碰机器人。传感器还能使机器人掌握力控制连接操作,过程监控,以及连续路径处理(必须要先感知物体的位置)。”
他发现从某种意义上这已经成为“人类操作员的第三只手”。在操作过程中,组件通过传送带被自动送给系统,操作员做准备。他将所有的小型机轻质零部件,比如间隔期和球状轴承,放进铸铝变速箱和盖子上。然后,操作员按一下按钮,启动机器人,由机器人小心翼翼地安装差速器箱。
 The latest generation of robots, such as the UR3 from Universal Robots, are designed and programmed to work in close proximity to human workers
The latest generation of robots, such as the UR3 from Universal Robots, are designed and programmed to work in close proximity to human workers机器人的另一个特点可以解释这样的机器是如何直接融合技术,并促进HRC方案的 — 这种情况就要保证那些就在机器人旁边工作的操作人员的绝对安全。Borkeloh解释说,集成扭矩传感器能够感知最轻微的外力,完成安全碰撞防护。他肯定的说,“在意外接触的情况下 — 人为的或是技术上的 — 机器人会瞬间降低速度,以此降低动能,直到排除伤害为止。”
但是,机器人整体设计也是很有作用的。据Borkeloh称,机器人的防护壳是全铝制造的,与流线型外部集合结构相吻合,没有锐缘,不需要进一步加工,就能消除挤压或剪切危险。尤其是该机器满足了功能安全的要求,符合相关国际标准 —DIN EN 62061 标准SIL 2,以及EN ISO 13849标准的性能指标d。
定性方法在这种情况下,Korkeloh肯定,在一个单调而高体力要求的工作站里,协作机器人是实现自动化的唯一可行之法。尽管如此,他还说,在实行HRC应用的时候,仅仅评估机器人是不够的。相反,要根据HRC指导,设计所有的特定应用。他说,“电池布局、传感器、工件、流程以及夹具,所有这些都要符合HRC生产理念。”但是Borkeloh还强调说,HRC方法的有点可能更趋向于定型的,而不是定量的。
他说,“在采用HRC应用程序时,改进循环时间并不总是首要目标。”实际上在这一点上,BMW Dingolfing工厂的循环时间只需要与之前人工操作系统一致就可以,即低于30秒 — 因为并不需要更快。但他说,“机器人极大提高了工人们安装零部件的能力,而且不会损坏齿轮。”
将业务完全投放在在提供协作机器人的公司,有丹麦Universal Robots(UR)。据UR公司首席技术官Esben Ostergaard称,在过去的8年里,机器人UR3、5、10的销售量达到15,000个,目前还在增长。这三款机器人都是6轴机械,最大的UR10机器人能够延伸1.7米,最高负重10公斤。
"Automata公司出品的EVA机器重量仅有8公斤(包括控制器在内),并通过互联网编程,只需要一台笔记本电脑“在与机器人同一个Wifi区域内”启动即可" - Suryansh Chandra, Automata
Ostergaard说,不考虑特殊行业,技术采用的“驾驶员”几乎都是一样的 — “综合灵活性与自动化的有利特点”。令人吃惊的是,他竟然说只考虑机器人之间的协作(比如UR公司提供的机器人)受到过度限制。他说,事实上安装需要人类和机器人之间的直接接触的情况“非常少见”。
相反,正确的方法应该是将机械当做“人类使用的工具而不是专家们使用的工具”。因此,机械的关键属性中应该包括安装简易型、可编程性、重新配置以及紧密型、轻质及整体安全性。Ostergaard还说,另一个关键属性就是,能够对从新翻新。
汽车制造肯定要计算客户基础,虽然Ostergaard并没有猜测到底有多少用户。他说,在制造环境中,机器人通常用于装配车间,而不是汽车车体修理厂,主要用于重复性操作,比如拉紧螺栓,虽然质量控制应用软件在不断升级。
有趣的是,他认为汽车用于的特点在于不愿意提升车间员工的编程责任(这可能是从之前‘高端’机器人应用中总结的经验),尽管写作机器人的程序非常简单,只需要通过移动掌控机器人。但是,这个责任一直落在专家们的肩上。
支持老龄员工有一个采用UR机器人来接多多个问题的汽车公司,那就是日本横滨Nissan Motor Company。公司并没有采用流线型生产流程,而是在努力解决雇佣老龄化员工,以及缺乏关键技术的问题。公司在电动车机混合动力车的发动机制造和零部件制造上,拥有3,200名员工。有一个问题不断严重,那就是装配领域的产距时间(特定流程的循环时间)超时严重。公司不得不采用应急工作人员,增加了劳动力和劳动力成本。
因此公司在两条生产线上使用Universal Robots公司的机器人手臂,为认为工人提供更多的时间,在其他领域积累更多的经验,并消除产距时间超时现象。开始,机器人用于松解气缸盖凸轮支架上的螺栓。这对机器人的能力提出了较高的要求,比如机器人本体需要轻质,便于移动,能够接受100V回路,不需要使用防护栏。
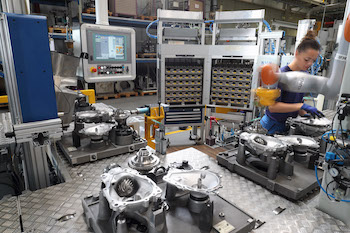 BMW has successfully introduced a collaborative robot into a transmission assembly station at its Dingolfing plant
BMW has successfully introduced a collaborative robot into a transmission assembly station at its Dingolfing plant其次,UR10机器人参与安装机体进气管的安装,这里就需要与人类工人协作完成。机器人要在没有防护栏的情况下在传送带上移动,而且还要拿着进气管组件,加上机器手的重量,能够达到4-6公斤。因此Nissan对比了很多公司的机器人,但是最后决定使用UR10机器人,因为单一机器人成本和重量上都体现了优势。公司称,只有UR10机器人能够负重10公斤。
机器人安装和编程,以及操作培训及基础操作需要大约1个星期。安装之后,程序可以进行稍微调整,之后就可以进行稳定操作了。因此,这能够解决公司产距时间超时的问题,而且还能降低员工负重劳动力的轻度。而且Nissan公司还说,UR机器人可以移动到任何出现产距时间超时的地方,生产设别可以根据情况灵活应用。
新款轻质协作机器人英国有一家新兴公司,正在引进首款产品 — 一个轻质、六轴协作机器人。公司称,这款机器人在易用性和可购性方面都达到了新的高度。公司名为Automata,伦敦的生产基地拥有13名员工,这对制造业或其他部门的公司起步相比较,有些不寻常。公司创始人是两名建筑师,Suryanshi Chandra和Mostafa ElSayed,他们之间在Zaha Hadid工作。据Suryansh Chandra称,他们对这个领域的兴趣是从与一个小型机器人合作经历(只是简单的踏板弯曲工作)引发的。他们都认为,编程技术对那些没有深入经验的人们来说,过于复杂,完全难以应付。
尽管如此,首先要做的就是要让用户注意到这个重量仅有8公斤的机器(包括集成控制器的重量),Chandra说这不需要特殊的装备,在任何普通的表面上都能轻松夹动。机器的其他性能参数 — 被称作EVA — 延伸举例达600mm,最高负重1,25公斤。
"在意外接触的情况下 — 人为的或是技术上的 — 机器人会瞬间降低速度,以此降低动能,直到排除伤害为止。" - Henning Borkeloh, Kuka
机器还有很多特点,比如Chandra说,机器非常轻,一个人就能轻松拿起并移动。有一点就是,机器采用轻质金属和束流元件,而且使用最少量的附加制造零部件。另一点就是在控制器上使用现代电器元件(也是轻质的),控制器放在机器的基础底部。还有一点,就是减少电机重量,点击用于启动机器。但是最基本的促成因素就是,所有的机械元素全是重新设计的。Chandra肯定的说,“我们不适用现成的元件。”
此外,编程能够用过互联网生效。Chandra说,所需要的就是使用笔记本电脑,进入专门的网络,“并在与机器人相同的wifi区域内启动”。然后,构成必要界面的视觉展示就会出现在屏幕上,提供实际编程,通过传统的键盘和鼠标实行。Chandra说,从本质上讲,植入在机器人内部的控制软件“后端”就是远程服务器。实际上,这个机器就是采用了工业4.0理念来编程的。他说,“这就是一个联网机器人”。此外,编程还可以按照规定程序人力移动机器人手臂来完成,尽管在机器里操纵和记录更加方便。
Chandra说,计划是在7月末或8月初正式推出EVA设备。但是他还肯定地说,有一家英国汽车组件供应商公司对他们的机器非常感兴趣,他们想要在二维码标签粘贴和机器维护方面使用机器人,尤其是在小型组件送递到生产线时取回,然后安装到制造设备上。