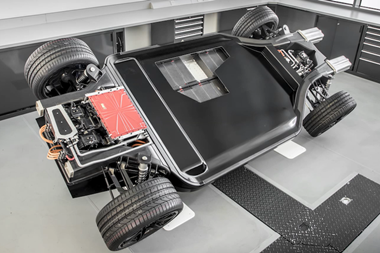
O uso de robôs colaborativos em operações de montagem automotivas está ganhando ritmo. A AMS informa sobre as aplicações, a tecnologia e por que esta é uma tendência crescente
 Um novo robô entrou em operação há apenas um ano na fábrica da BMW em Dingolfing, na Alemanha. Mas esta máquina não é um equipamento enorme e poderoso para uma aplicação como pintura de veículos ou soldagem. Em vez disso, representa o primeiro exemplo na planta de uma tendência que está crescendo constantemente no setor automotivo, a de colaboração de robôs humanos (HRC), também conhecida como robótica colaborativa.
Um novo robô entrou em operação há apenas um ano na fábrica da BMW em Dingolfing, na Alemanha. Mas esta máquina não é um equipamento enorme e poderoso para uma aplicação como pintura de veículos ou soldagem. Em vez disso, representa o primeiro exemplo na planta de uma tendência que está crescendo constantemente no setor automotivo, a de colaboração de robôs humanos (HRC), também conhecida como robótica colaborativa.
A máquina neste caso é um robô leve LBR iiwa da Kuka, que foi encaixado em uma área anteriormente ocupada por um operador humano sozinho para apoiá-los na mesma tarefa árdua e repetitiva de levantamento e, em seguida, instalação para casos diferenciais de eixos de transmissões. Os casos envolvidos podem pesar até 5,5 kg e, independentemente da tensão de levantar-lhes, sua instalação é, necessariamente, uma tarefa que exige tanto precisão para garantir um ajuste preciso como delicadeza para evitar danos a qualquer um dos elementos do sistema envolvidos.
Conseguir que a aplicação robótica inovadora na planta funcione foi o resultado de um esforço conjunto tanto do fabricante de carros como do fornecedor de robôs, que envolveu o trabalho de desenvolvimento na fábrica da BMW em Augsburg antes que o conceito fosse finalizado e implementado em Dingolfing. Um aspecto interessante da configuração neste caso é que o robô está montado em uma posição invertida acima da área de trabalho a partir de uma estrutura de aço fino - uma abordagem facilitada pela própria construção leve do robô. Ele pesa apenas 30 kg.
Henning Borkeloh, vice-presidente de soluções de tecnologia avançadas para Kuka, confirma esses detalhes principais. Não menor são os limites restritos do espaço total ocupado pelo robô e sua estrutura de suporte. A pegada da estrutura de suporte, ele relata, é 200x200mm e sua altura 1.400mm.
.

Peças pesadas, toque leve
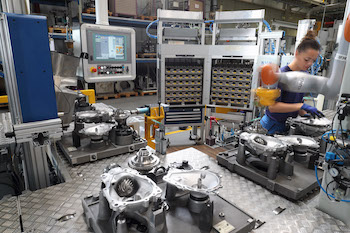
Duas linhas dos braços do robô UR10 da Universal Robots foram instalados na fábrica da Yokohama da Nissan para oferecer mais tempo aos trabalhadores humanos para obter uma experiência de linha em outra parte.
Mas, como Borkeloh explica, o projeto exigiu algum pensamento inteligentes para lidar com os desafios envolvidos."Ajustar o caso do diferencial pesado é uma tarefa incrivelmente delicada", ele observa. "Os flancos dos dentes sensíveis não devem ser danificados por impactos ao acionar as engrenagens. Um dos desafios foi a variação do peso das diferentes peças que tiveram de ser montadas. Basicamente, tivemos que encontrar os parâmetros certos para ajustar a sensibilidade de torque do robô aos vários requisitos."
No entanto, Borkeloh afirma que o aspecto mais visualmente surpreendente da aplicação - a inversão do robô - é realmente bastante excepcional do ponto de vista da Kuka ."Não é incomum para nós", afirma. "Nós já implementamos soluções montadas no teto para vários clientes". A construção do próprio robô também é um fator habilitador. "O LBR iiwa possui sensores de torque conjunto em cada um dos sete eixos, o que significa que não requer sensores externos", explica. "Combinado com a construção leve do robô, isso permite que ele funcione a partir de qualquer posição".
Uma terceira mão
Na verdade, o Borkeloh continua, o sistema de sensor incorporado ao robô é absolutamente crucial para sua adequação para essa aplicação específica. "Montar uma engrenagem diferencial é um aplicativo altamente sensível, porque as roda dentadas devem ser cuidadosamente engrenadas com outra parte do dente", ele observa. Como tal, o fato de que a máquina possui sensores de torque articulados integrados em todos os seus eixos garante que ele possua as capacidades de detecção de contato necessárias e a conformidade programável. "Isso significa que os humanos que acompanham podem controlar a sequência de uma aplicação de robô sem equipamento de controle simplesmente através de gestos - por exemplo, tocando no robô", ele acrescenta. "Os sensores também permitem ao robô dominar operações de junção controladas por força, monitoramento de processo e processos de caminho contínuo para os quais a posição dos objetos devem ser detectadas."
Em certo sentido, torna-se, ele observa, "a terceira mão humana do operador". Em operação, os componentes são alimentados ao sistema automaticamente ao longo de um transportador e preparados pelo operador, que coloca todas as peças pequenas e leves, como espaçadores e rolamentos de esferas, na caixa de transmissão de alumínio fundido e na tampa. O operador, em seguida, pressiona um botão para ativar o robô, que entra em operação para encaixar cuidadosamente o gabinete do diferencial.
 A última geração de robôs, como o UR3 da Universal Robots, são projetados e programados para trabalhar em proximidade com trabalhadores humanos
A última geração de robôs, como o UR3 da Universal Robots, são projetados e programados para trabalhar em proximidade com trabalhadores humanosEnquanto isso, outra característica do robô ilustra como essas máquinas agora podem incorporar tecnologia que facilita uma abordagem BCR diretamente em si mesma - neste caso, a capacidade absolutamente essencial de garantir a segurança das pessoas que trabalharão na proximidade dela. Borkeloh explica que os sensores de torque integrados respondem ao mínimo de forças externas para permitir uma proteção segura contra colisões."No caso de contato inesperado - humano ou técnico - o robô reduz sua velocidade instantaneamente, reduzindo sua energia cinética para um nível que impede lesões", ele confirma.
Mas o design geral do robô também desempenha um papel. De acordo com a Borkeloh, o abrigo da máquina é feito inteiramente de alumínio, em um conjunto com uma geometria externa aerodinâmica sem bordas afiadas atuando ainda para eliminar os riscos de esmagamento e cisalhamento. Especificamente, as máquinas cumprem os requisitos de segurança funcional, de acordo com os padrões internacionais relevantes - DIN EN 62061 até SIL 2 e EN ISO 13849 até o Nível de Desempenho realizado na Categoria 3.
Uma abordagem qualitativa
Neste caso, Borkeloh está certo de que um robô colaborativo era a única solução viável para automatizar a tarefa monótona e fisicamente exigente dentro de uma estação. No entanto, ele adverte que, ao implementar aplicativos HRC, não basta apenas avaliar o robô. Em vez disso, a aplicação específica na sua totalidade deve ser projetada de acordo com as diretrizes da CDH. "O layout da célula, os sensores, as peças, o processo e as pinças devem ter um conceito de produção do HRC", afirma. Mas Borkeloh também enfatiza que os benefícios de uma abordagem BCR podem ser qualitativos e não quantitativos. "Ao implementar aplicativos BCR, melhorar o tempo de ciclo nem sempre é o principal objetivo", afirma. Na verdade, com relação a isso, tudo o que era necessário na BMW Dingolfing era atender o mesmo tempo de ciclo que o sistema manual anterior, que é menos de 30 segundos - não havia necessidade de executá-lo mais rápido. No entanto, ele diz: "o robô melhorou drasticamente a capacidade dos trabalhadores de colocar as peças suavemente sem danificar os dentes das engrenagens".
Enquanto isso, uma empresa que baseou seus negócios inteiramente na oferta de robôs colaborativos é a Universal Robots de equipamento dinamarquês (UR). De acordo com o diretor de tecnologia da UR, Esben Ostergaard, a empresa acumulou vendas de cerca de 15.000 de suas máquinas UR3, 5 e 10 nos últimos oito anos e atualmente continua crescendo rapidamente. Os três dos seus robôs são máquinas de seis eixos com o maior - o UR10 - com um alcance de 1,7m e uma capacidade de carga máxima de 10kg.
"A máquina EVA da Automata pesa apenas 8kg, incluindo o controlador e pode ser programada pela internet, exigindo apenas um computador laptop configurado dentro da "mesma área Wifi que o robô" - Suryansh Chandra, Automata
Ostergaard diz que, independentemente da indústria em particular, o "motivador" para a adoção da tecnologia é quase sempre o mesmo - "combinar os benefícios da flexibilidade com os da automação". Surpreendentemente, porém, ele também diz que pensar apenas em termos de trabalho cooperativo entre robôs, como a UR fornece é excessivamente restritivo. Na verdade, ele diz que as instalações que envolvem a interação direta entre pessoas e robôs são realmente "bastante raras". Em vez disso, a abordagem certa é pensar nas máquinas como "ferramentas que podem ser usadas pelas pessoas, e não apenas por especialistas". Como tal, os principais atributos das máquinas incluem a facilidade de instalação, programação e reconfiguração, bem como capacidade de segurança leve e integral. Ostergaard acrescenta que outro atributo chave é a forma como eles podem ser facilmente adaptados às operações existentes.
A fabricação automotiva certamente se enquadra na base de clientes da empresa, embora Ostergaard não arrisque a adivinhar quantos usuários existem. Em ambientes de OEMs, ele relata, as máquinas são geralmente usadas em operações de montagem em vez de oficinas de pintura para operações simples, mas repetitivas, como aperto de parafusos, embora as aplicações de controle de qualidade estejam aumentando. Curiosamente, ele observa que uma característica distinta dos usuários automotivos, que presumivelmente decorre da experiência anterior de aplicativos robotizados "de alto nível" caras, é uma relutância em transferir a responsabilidade de programação para o pessoal da oficina , mesmo que os procedimentos para máquinas colaborativas - manipulação física do Braço do robô através dos movimentos necessários - sejam muito diretos. Em vez disso, a responsabilidade continua sendo a de mais pessoal especializado.
Apoiando uma força de trabalho em envelhecimento
Uma empresa automotiva que adotou os robôs da UR como uma solução para várias questões é a Nissan Motor Company em sua fábrica em Yokohama, no Japão. Além de racionalizar os processos de produção, ela também estava buscando lidar com os problemas causados pelo envelhecimento da força de trabalho e pela perda de habilidades vitais.
A planta emprega 3.200 pessoas na fabricação de motores e peças para carros elétricos e híbridos. Uma questão que estava se provando problemática era a invasão persistente em níveis de 'tempo de takt' - o tempo de ciclo de um processo específico - em áreas de montagem. Isso fazia com que a empresa usasse trabalhadores de alívio com aumentos concomitantes nos custos trabalhistas.
 A BMW introduziu com sucesso um robô colaborativo em uma estação de montagem de transmissão em sua fábrica de Dingolfing
A BMW introduziu com sucesso um robô colaborativo em uma estação de montagem de transmissão em sua fábrica de DingolfingAssim, duas linhas dos braços do robô UR10 da Universal Robots foram implantadas na fábrica para oferecer mais tempo aos trabalhadores humanos para obter experiência em linha em outros lugares, além de eliminar os atrasos nos tempos de takt. Os robôs foram inicialmente implantados para afrouxar parafusos nos suportes de câmeras da cabeça do cilindro. Isso representava algumas exigências altamente específicas para as capacidades do robô, incluindo que o corpo principal do robô deveria ser leve e fácil de mover, compatível com uma tomada de 100 V e utilizável sem vedação de segurança.
Posteriormente, as máquinas UR10 foram empregadas como parte do processo de instalação de coletores de admissão do bloco do motor, o que significava que eles precisariam trabalhar em colaboração com humanos. Isso significaria movimento através de correias transportadoras sem cercas de segurança, além de transportar componentes do coletor de admissão que constitui cargas de 4-6 kg quando incluem as mãos do robô. A Nissan, portanto, fez uma comparação com os robôs de várias empresas, mas informa que o UR10 foi selecionado por causa de suas vantagens em custo para um robô único, bem como sua capacidade de peso. Ele afirma que apenas o UR10 tinha a capacidade de carga útil de 10kg.
Os robôs foram instalados e programados com operados treinados e operações básicas em curso em cerca de uma semana. Os programas foram ligeiramente ajustados após a instalação e têm funcionado de forma constante desde então, resolvendo o problema de invasão do takt da empresa e reduzindo a quantidade de trabalho pesado necessário para o pessoal. Além disso, a Nissan agora diz que será capaz de mover o robô UR para qualquer lugar no qual considere que o tempo de captura excede e pode pensar em criar equipamentos de produção capazes de responder de forma flexível à situação.
Novo cobot leve
Enquanto isso, uma pequena empresa no Reino Unido está à beira da introdução do seu primeiro produto: um robô colaborativo leve e de seis eixos que afirma que estabelecerá novos padrões de referência tanto para instalação de uso quanto para acessibilidade. A empresa, chamada Automata, que agora emprega 13 pessoas em sua base em Londres, tem algumas origens bastante incomuns para uma que visa vender na indústria transformadora, bem como em outros setores. Seus co-fundadores são dois arquitetos Suryansh Chandra e Mostafa ElSayed, que anteriormente trabalharam com Zaha Hadid. De acordo com Suryansh Chandra, seu interesse pela área foi estimulado por sua experiência em trabalhar com um pequeno robô na tarefa aparentemente simples de flexão de painéis, o que levou ambos a decidirem que as técnicas de programação em particular eram excessivamente complexas e intimidadoras para as pessoas sem -devido a experiência com tecnologia.
No entanto, a primeira coisa sobre a máquina que um usuário provavelmente notará é simplesmente seu peso de apenas 8kg, incluindo seu controlador integral, o que Chandra diz significa que não requer nenhum tipo especial de montagem, mas pode ser simplesmente preso a quase todas as superfícies comuns disponíveis. Outros parâmetros de desempenho para a máquina - que é chamado de EVA - são um alcance de 600mm e uma carga útil máxima de 1.25kg.
"No caso de contato inesperado - humano ou técnico - o robô reduz sua velocidade instantaneamente, reduzindo assim sua energia cinética para um nível que impede lesões" - Henning Borkeloh, Kuka
Uma série de fatores facilitam esse baixo peso, que, como Chandra acrescenta, significa que a máquina pode ser apanhada e movida por apenas um único indivíduo. Um deles é o uso de componentes metálicos leves e plásticos obtidos por algum uso pelo menos de peças fabricadas aditivamente. Outro é o uso da eletrônica moderna - e novamente intrinsecamente leve - no controlador, que está alojada na base da máquina. Mais um é o consequente peso diminuído do motor elétrico necessário para alimentar a máquina. O fator de habilitação fundamental, porém, é que todos os elementos da máquina são desenhados a partir do zero para alcançar esses objetivos. "Nós não usamos componentes da fábrica", confirma Chandra.
Além disso, a programação pode ser efetuada pela internet. Chandra diz que tudo o que é necessário é acessar um site dedicado através de um computador laptop que precisa ser configurado "dentro da mesma área wifi como o robô". Em seguida, uma representação visual do robô que constitui a interface necessária aparecerá na tela com a programação real implementada através de rotinas convencionais de teclado e mouse. Essencialmente, explica Chandra, um "back-end" para o software de controle que reside no próprio robô está localizado em um servidor remoto. Como tal, a máquina, de fato, faz uso dos princípios da Industry 4.0 para sua programação. "É um robô conectado", ele confirma. Alternativamente, a programação também pode ser realizada pelo procedimento estabelecido para mover fisicamente o braço do robô, apesar das manobras desejadas e gravá-las na máquina.
Chandra diz que o lançamento formal do dispositivo EVA está programado para o final de julho ou início de agosto. Mas ele também confirma que uma das empresas que já se interessam pela máquina é um fornecedor de componentes automotivos com sede no Reino Unido, que está considerando usá-lo para aplicações, incluindo o anexo do rótulo do código de barras e a tendência da máquina, especificamente a recuperação de pequenos componentes à medida que são entregues à linha de produção e para depois carregá-los em equipamentos de fabricação.